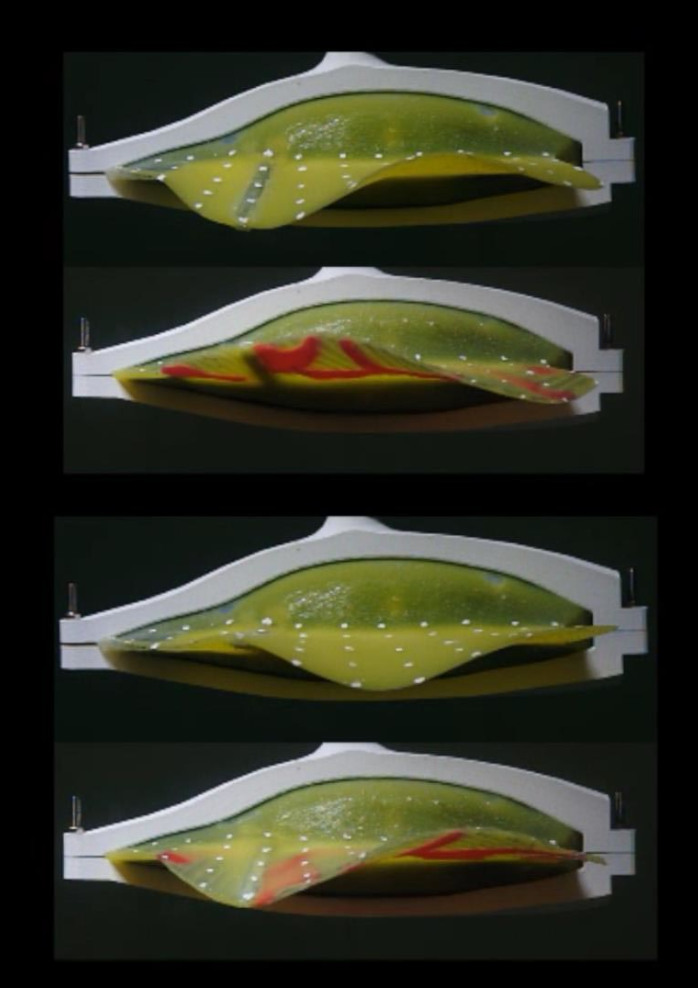
A stingray robot with soft material fins that can travel underwater
3D PrintingArduinoElectronic circuit
Stingray robot halfway through fins printing process
About the project:
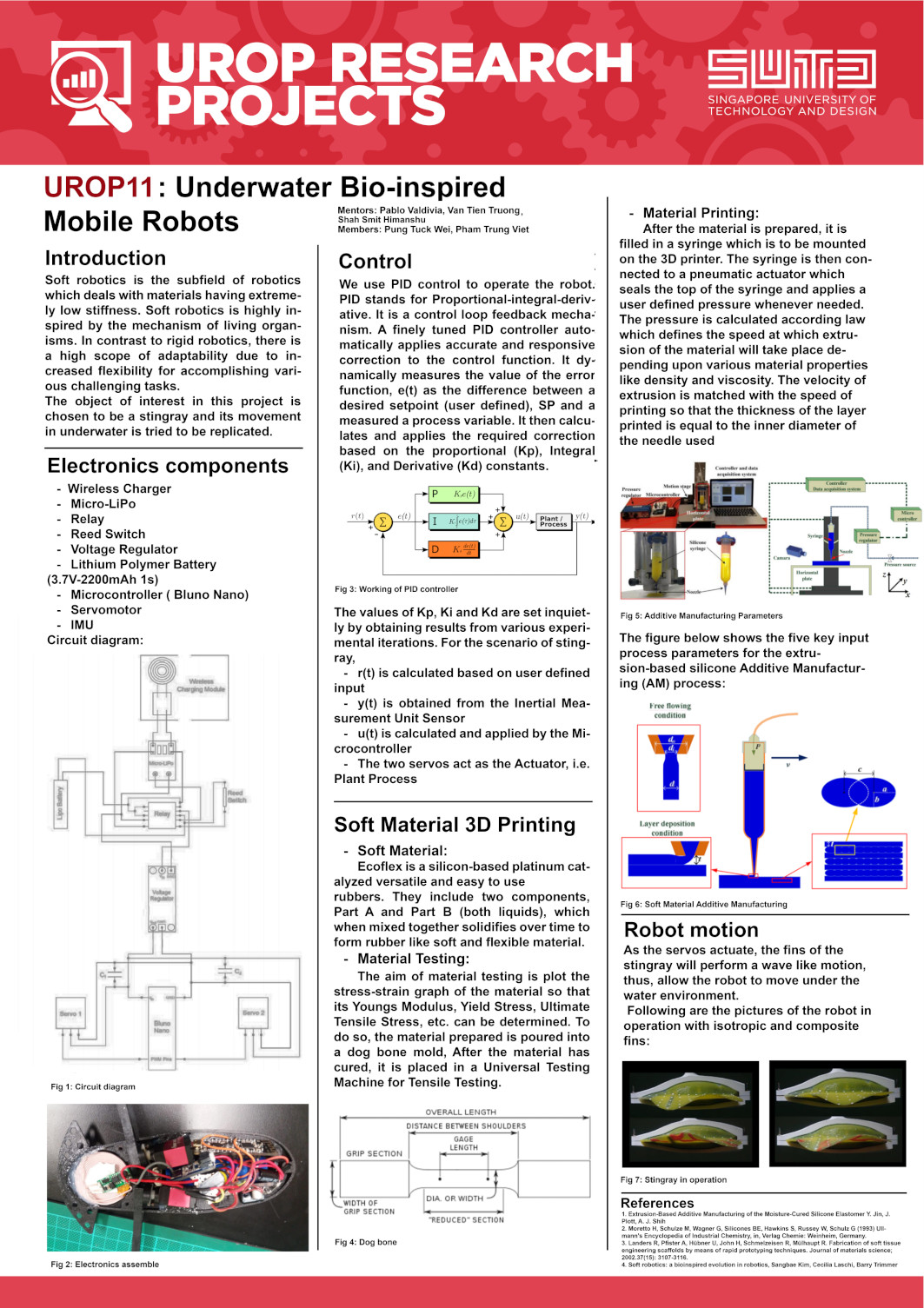
The main aim of the project was to explore the fabrication of soft material for robotics part in order to perform more versatile task. As such, the stingray robots was built to have soft fins that are controlled by actuators to perform wavelike motion, hence allowed it to swim underwater.
My role in the project was to assist the integration of the IMU unit to the robot circuit. This will help to track and stablise the robot's movement under water.
This project was done under SUTD's Undergraduate Research Opportunity Programme (UROP). The project was supervised by Professor Pablo Valdivia y Alvarado and his colleagues.